
| Головна » Статті » Конференція_2015_03_19-20 » Секція_2_Технології_і_природа |
Лавренко Володимир старший викладач Полтавська державна аграрна академія м. Полтава
ОСОБЛИВОСТІ РОБОТИ КУЛЬТИВАТОРНИХ ЛАП ПРИ ПОВЕРХНЕВОМУ ОБРОБІТКУ ГРУНТУ З ОДНОЧАСНИМ ВНЕСЕННЯМ ДОБРИВ
Головним завданням якісного обробітку ґрунту є впровадження енерго- і волого-зберігаючих технологій вирощування сільськогосподарських культур. Підготовка ґрунту та внесення добрив безпосередньо в площину живлення рослин є важливим технологічним процесом, оскільки він спрямований на створення оптимальних умов для вегетації рослин. Метою досліджень є зниження енергоємності польових робіт за рахунок створення комбінованого робочого органу для поверхневого обробітку ґрунту з одночасним внесенням добрив безпосередньо в зону живлення. Зниження енергозатрат та підвищення технологічних показників роботи шляхом розробки конструкції та обґрунтування оптимальних параметрів культиваторних лап з можливістю одночасного внесення добрив безпосередньо в зону живлення рослин та рівномірного розподілу їх у горизонтальній площині по всій ширині захвату. Об’єктом дослідження є технологічний процес поверхневого обробітку ґрунту з одночасним внесенням добрив культиваторною лапою, яка має криволінійну поверхню та стійку певної форми, призначену для транспортування та розподілу добрив в горизонтальній площині під лапою. Структура ґрунту суттєво впливає на середовище в якому проростає насінина і розвивається та формується коренева система майбутньої рослини. Існуючі моделі ґрунтового середовища є першоосновою при виборі способів механізованого обробітку і засобів для його здійснення, що дають можливість створити необхідний водно-повітряний режим, який відповідає умовам ефективного використання добрив без їх надлишку та підвищує урожайність. Машини, які виконують поверхневий обробіток ґрунту повинні забезпечити: необхідну структуру ґрунту, підготувати поверхневий шар до сівби, покращити водно-повітряний режим, що в свою чергу суттєво вплине на рівень біологічного врожаю. За якістю виконання агротехнічних прийомів механізовані технології класифікують за трьома рівнями:
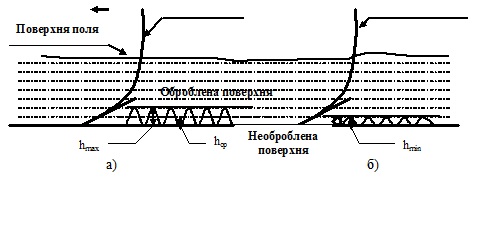
Кожен із цих рівнів технологій передбачає відповідні комплекси техніки та різну ефективність їх використання. Формування робочих органів для поверхневого обробітку починається з урахування геометричних, кінематичних та динамічних умов їх роботи. Робочі органи, які здійснюють поверхневий обробіток поділяються на – активні і пасивні. Активні робочі органи, на думку багатьох дослідників, надають можливість обробляти ґрунт в більш складних умовах (задернілість, грудкуватість, твердість). При цьому, характер руху різальної частини робочого органу може бути різним, що призводить до нерівномірного обробітку. Пасивні робочі органи дають можливість проводити обробіток ґрунту з меншою нерівномірністю. Нерівномірність обробітку може бути оцінено коефіцієнтом нерівномірності δ.[1, 2] Особливі вимоги висуваються до робочих органів, які виконують поверхневий обробіток ґрунту з одночасним внесенням добрив. Такий робочий орган повинен мати невеликий коефіцієнт нерівномірності, забезпечувати рівномірний розподіл добрив по всій ширині лапи. При цьому добрива повинні розподілятися рівномірно без накопичення в одній зоні. Лапа повинна забезпечувати розподіл добрив в кореневу зону рослини.[3, 4] Для забезпечення вказаних умов пропонується в конструкціях культиватора, лапи розміщувати на жорстко закріплених стояках спеціальної форми, які виконують функцію тукопроводів. Підлаповий простір виконаний по кривим другого порядку з вирівнювачем. Така конструкція забезпечуює необхідну рівномірність руху лапи в ґрунті та заданий розподіл добрив по горизонтальній площині. На рисунку представлено рух існуючих та експериментальної лап в ґрунті. Оцінка нерівномірності обробітку ґрунту лапами можна виконати за допомогою коефіцієнта нерівномірності δ, який визначається за формулою: δ =2(hmax - hmin)/hср, (1) де δ – відхилення від заданої глибини обробітку, мм; hср - середнє значення глибини відхилення, мм; hmax - максимальне значення глибини відхилення, мм; hmin - мінімальне значення глибини відхилення, мм. При виконанні поверхневого обробітку ґрунту з одночасним внесенням добрив для зменшення нерівномірності, покращення розподілу добрив в ґрунті, підвищення урожайності сільськогосподарських культур, робочий орган культиватора повинен біти жорстко закріплений, підлаповий простір виконаний по кривим другого порядку і оснащений вирівнювачем.
Рис. 1. Рух існуючих (а) і експериментальної з вирівнювачем(в) лап в поверхневому шарі ґрунту
Література
| |
| Категорія: Секція_2_Технології_і_природа | Додав: Admin (18.03.2015) | |
| Переглядів: 505 |
| Всього коментарів: 0 | |
